Puente H con driver L298
En otra entrada explicamos que es y como funciona un puente H , vimos que es una configuración circuital de diodos que nos permite controlar el giro de un motor, básicamente los diodos actúan como controladores de la polaridad que se le aplica al motor.
Existen varios driver que ya tienen toda la electrónica resulta, ya hablamos en otra oportunidad del L293 ahora es el turno del driver L298.
Driver L298
Este driver permite controlar dos motores de corriente continua y motores paso a paso de no mas de 2 amperes, existen algunos módulos disponibles para la compra que ya vienen con el driver soldado y algunos pines para controlar las entradas y las salidas.
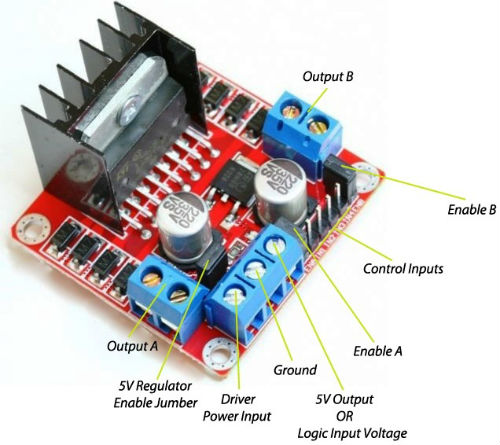
como se puede ver en la imagen el modulo ya cuenta con lo siguiente
- Regulador de voltaje LM7805
- Conectores Output A y Output B que son las salidas de los motores
- Control inputs, son los terminales de control, dos de ellos son los pines de habilitación de cada motor
- Jumper para decidir si voy a utilizar el regulador LM7805 o no lo voy a utilizar.
Hay que tener presente el voltaje con el cual lo vamos a alimentar, si bien el modulo tiene un regulador de tensión y es capaz de soportar tensiones de hasta 36V, también tiene un Jumper que nos permite decidir si lo usamos o no.
Si vamos a alimentar el modulo con la misma tensión que alimentamos el microcontrolador o la placa arduino, no es necesario utilizar el regulador, ya que el driver l298 tolera tensiones de entre 6 y 12 volt, los mismos niveles que se usan para alimentar el arduino.
En el caso que alimentemos el modulo con tensiones superiores a 12V si o si tenemos que conectar el jumper para que utilice el regulador, de lo contrario podemos quemarlo en cuestión de segundos.
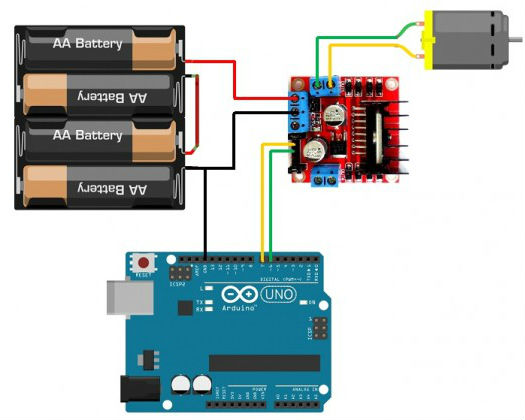
Control motor de corriente continua
Vamos a mostrar como controlar un motor de corriente continua con el driver L298 utilizando la placa arduino uno R3. Como se ve en la imagen para controlar el motor solo utilizamos dos pines de nuestro arduino, dependerá si enviamos un uno o un cero el sentido de giro del motor
Codigo Arduino
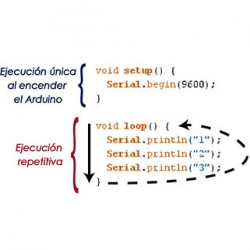
El siguiente código es un ejemplo simple del funcionamiento, se hace girar el motor en una dirección durante 5 segundos luego frena un segundo y vuelve a girar otros cinco segundos en dirección contraria.
Es un ejemplo simple pero es muy útil para ilustrar el funcionamiento del driver l298 y el modulo
int IN3 = 5;
int IN4 = 4;
void setup()
{
pinMode (IN4, OUTPUT); // entrada 4
pinMode (IN3, OUTPUT); // entrada 3
}
void loop()
{
// Motor gira en un sentido
digitalWrite (IN4, HIGH);
digitalWrite (IN3, LOW);
delay(5000);
// Motor no gira
digitalWrite (IN4, LOW);
delay(1000);
// Motor gira en sentido inverso
digitalWrite (IN3, HIGH);
delay(5000);
// Motor no gira
digitalWrite (IN3, LOW);
delay(1000);
}
COMPRAR DRIVER L298
[amazon_link asins='B016GMTDT4,B077NY9RY6,B01MYS3D1F,B077LV4W5Z,B01N9Q5WPQ,B077LYY1Z9,B06X96MNQC' template='ProductCarousel' store='electrontoo01-21' marketplace='ES' link_id='8ed76d6a-9a64-11e8-a0a5-c71a944e89bf']
Si quieres conocer otros artículos parecidos a Puente H con driver L298 puedes visitar la categoría Arduino.
MODULO DE RADIO FRECUENCIA RF433 - ARDUINO

ARDUINO PRIMO - LA NUEVA GENERACION
MEDIR HUMEDAD DEL SUELO CON ARDUINO
Como usar las interrupciones en arduino
Programación arduino uno

Encender un led con arduino
-
Pingback: Motores Arduino | Aprendiendo Arduino
-
 Alfonso Cobos GZz dice:
Alfonso Cobos GZz dice: Muchas gracias por compartir tus conocimientos, me enviaron un L298D para controlar 4 motores me puedes decir como conectarlo? (quiero armar un carro)
gracias de antemano
Deja un comentario